 Radar-Camera Fusion System
Radar-Camera Fusion System
Overview
Radar-Camera Fusion is an early-stage research project from my master’s studies, exploring multi-sensor fusion techniques for enhanced target detection and tracking. This project implements a late fusion strategy that combines the complementary strengths of mmWave radar and camera sensors to achieve robust object localization and tracking in various scenarios.
Note: This was one of my initial research explorations during my master’s program. While I may not recall every implementation detail, the core methodology and system architecture remain documented here.
System Architecture
The system implements a late fusion strategy where radar and camera data are processed independently before being fused at the decision level. This approach leverages the strengths of both sensors:
- Camera: Provides rich visual information for object classification
- mmWave Radar: Offers accurate range, velocity, and robust performance in adverse conditions
Fusion Pipeline
Camera Stream Range/Azimuth Extraction
↓ ↓
ROI Crop Point Cloud Processing
↓ ↓
YOLO Detection Radar Point Cloud
↓ ↓
DeepSORT Tracking ↓
↓ ↓
Monocular Ranging ↓
↓ ↓
└────→ Data Fusion ←────┘
↓
Fused Target Info
Core Components
1. Camera Processing Pipeline
ROI Extraction
- Image Preprocessing: Frame capture and region of interest cropping
- Adaptive ROI: Dynamic region selection based on scene context
- Resolution Optimization: Balanced processing speed and detection accuracy
YOLO Object Detection
- Real-time Detection: YOLOv5 for fast and accurate object detection
- Multi-Class Recognition: Supports pedestrians, vehicles, and other objects
- Bounding Box Output: Precise object localization in image coordinates
DeepSORT Tracking
- Multi-Object Tracking: Maintains consistent IDs across frames
- Appearance Features: Deep learning-based appearance descriptor
- Kalman Filtering: Smooth trajectory prediction and association
- ID Management: Handles occlusions and re-identification
Monocular Distance Estimation
- Pinhole Camera Model: Geometric-based distance calculation
- Calibration: Camera intrinsic parameter calibration
- Height-Based Ranging: Estimates distance using object height and camera parameters
- Azimuth Calculation: Computes horizontal angle from image coordinates
2. Radar Processing Pipeline
Point Cloud Generation
- mmWave Radar: Processes raw radar data to extract point clouds
- Range-Azimuth-Elevation: 3D spatial information for each detection
- Velocity Information: Doppler-based velocity measurement
- SNR Filtering: Signal quality-based point filtering
Target Extraction
- Clustering: Groups radar points into distinct targets
- Centroid Calculation: Computes target center position
- Velocity Estimation: Extracts radial velocity for each target
3. Late Fusion Strategy
Spatial Alignment
- Coordinate Transformation: Converts camera and radar coordinates to common reference frame
- Calibration Matrix: Extrinsic calibration between camera and radar
- Temporal Synchronization: Aligns timestamps between sensors
Data Association
- Position Matching: Associates camera detections with radar points based on spatial proximity
- Gating Threshold: Defines acceptable matching distance
- Confidence Weighting: Combines detection confidences from both sensors
Fused Output
- Enhanced Localization: Improved position accuracy by combining both sensors
- Velocity Information: Radar-provided velocity enriches camera detections
- Robust Detection: Maintains tracking even when one sensor fails
Technical Highlights
Advantages of Late Fusion
- ✅ Modularity: Independent processing allows easy sensor replacement or upgrade
- ✅ Robustness: System continues functioning if one sensor fails
- ✅ Flexibility: Can adjust fusion weights based on environmental conditions
- ✅ Interpretability: Clear understanding of each sensor’s contribution
Challenges Addressed
- Calibration Complexity: Precise spatial and temporal alignment between sensors
- Coordinate Transformation: Accurate mapping between different sensor coordinate systems
- Association Ambiguity: Resolving which radar points correspond to which camera detections
- Computational Efficiency: Real-time processing of dual sensor streams
Applications
The radar-camera fusion system is particularly well-suited for scenarios requiring both visual recognition and precise ranging:
Autonomous Driving
- Pedestrian Detection: Enhanced detection accuracy in various lighting conditions
- Vehicle Tracking: Robust tracking with velocity information
- Obstacle Avoidance: Reliable distance measurement for path planning
Intelligent Surveillance
- Perimeter Security: Combined visual identification and range verification
- Intrusion Detection: Multi-modal confirmation reduces false alarms
- Crowd Monitoring: Track multiple targets with unique identities
Smart Transportation
- Traffic Flow Analysis: Vehicle counting and speed measurement
- Parking Management: Occupancy detection with vehicle classification
- Intersection Monitoring: Multi-target tracking at complex scenarios
Robotics
- Navigation: Obstacle detection and avoidance
- Human-Robot Interaction: Safe distance maintenance and gesture recognition
- Object Manipulation: Precise localization for grasping tasks
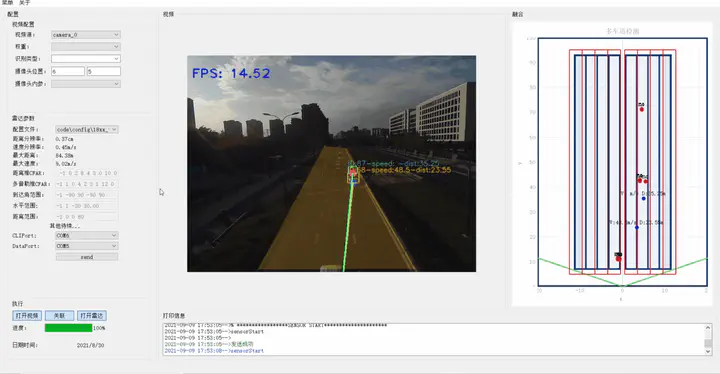
System Demonstration

The demonstration shows the system’s ability to:
- Detect and classify objects using camera-based YOLO
- Track multiple targets with DeepSORT
- Fuse camera-derived positions with radar point clouds
- Provide accurate range and velocity information
Technical Specifications
Camera Module
- Resolution: 1920×1080 (Full HD)
- Frame Rate: 30 FPS
- Field of View: 60° horizontal
- Detection Network: YOLOv5
- Tracking Algorithm: DeepSORT
Radar Module
- Frequency: 77 GHz mmWave
- Range Resolution: 0.1-0.2 m
- Velocity Range: ±50 m/s
- Angular Resolution: 15° (azimuth)
- Update Rate: 10-20 Hz
Fusion Performance
- Latency: < 100 ms (end-to-end)
- Position Accuracy: ±0.3 m (fused)
- Tracking Range: 0.5-50 m
- Max Targets: 10+ simultaneous objects
Lessons Learned
This early research project provided valuable insights into multi-sensor fusion:
- ✅ Complementary Strengths: Camera excels at classification, radar at ranging
- ✅ Calibration is Critical: Accurate sensor alignment is essential for fusion
- ✅ Late Fusion Trade-offs: Simpler implementation but may miss low-level correlations
- ✅ Real-time Challenges: Synchronization and computational efficiency are key
Future Directions
While this project explored late fusion, modern approaches might consider:
- Early Fusion: Fusing raw sensor data for richer feature extraction
- Deep Learning Fusion: End-to-end neural networks for joint processing
- Adaptive Fusion: Dynamic weighting based on environmental conditions
- Additional Sensors: Incorporating LiDAR or thermal cameras
Qin Chen 陈钦
Ph.D of Information and Communication Engineering
My research interests include Human-computer interaction, signal processing and machine learning.